|
DirectTrajectoryOptimization
v0.3
|
|
DirectTrajectoryOptimization
v0.3
|
Class handling the defects of a multiple shooting method. More...
#include <shooting_constraint.hpp>
Public Member Functions | |
| ShootingConstraint (const int &n_func, const int &n_vars, std::shared_ptr< DTOMultipleShooting< DIMENSIONS >> my_owner) | |
| Constructor of ShootingConstraint. More... | |
| virtual Eigen::VectorXd | Evalfx (const Eigen::VectorXd &in_vect) override |
| To be overloaded by the derived class. More... | |
 Public Member Functions inherited from DirectTrajectoryOptimization::BaseClass::GenericConstraintsBase Public Member Functions inherited from DirectTrajectoryOptimization::BaseClass::GenericConstraintsBase | |
| EIGEN_MAKE_ALIGNED_OPERATOR_NEW | GenericConstraintsBase (int num_eq, int num_var) |
| Generic Constraint Constructor. More... | |
| virtual void | fx (const Eigen::VectorXd &in, Eigen::VectorXd &out) override |
| Overload this method in the derived class to obtain numerical approximation of the gradient. | |
| virtual Eigen::MatrixXd | EvalFxJacobian (const Eigen::VectorXd &input) |
| To be overloaded by the derived class in case NumDiff is not required. More... | |
| Eigen::VectorXd | GetConstraintsLowerBound () |
| Method to get the lower bound of the constraint. More... | |
| Eigen::VectorXd | GetConstraintsUpperBound () |
| Method to get the upper bound of the constraint. More... | |
| void | SetConstraintsLowerBound (const Eigen::VectorXd &g_lb_candidate) |
| Method to set the lower bound of the constraint. More... | |
| void | setConstraintsUpperBound (const Eigen::VectorXd &g_ub_candidate) |
| Method to set the upper bound of the constraint. More... | |
| void | initialize_num_diff () |
| Overload this method to define the local pointers. More... | |
Public Attributes | |
| double | ms_dt_ = 0.001 |
| Public Attributes inherited from DirectTrajectoryOptimization::BaseClass::NumDiffDerivativesBase | |
| std::shared_ptr< FunctionOperator > | numdifoperator |
| std::shared_ptr < Eigen::NumericalDiff < FunctionOperator > > | numDiff |
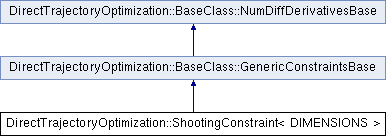
Class handling the defects of a multiple shooting method.
uses the mechanisms for numdiff provided by generic constraints base class
|
inline |
Constructor of ShootingConstraint.
| [in] | n_func | The size of the vector of defects |
| [in] | n_vars | The number of variables |
| [in] | my_owner | Pointer to the DTOMultipleShooting using this object |
|
overridevirtual |
To be overloaded by the derived class.
Constraint function to be evaluated
Implements DirectTrajectoryOptimization::BaseClass::GenericConstraintsBase.
| double DirectTrajectoryOptimization::ShootingConstraint< DIMENSIONS >::ms_dt_ = 0.001 |
The integration step
 1.8.6
1.8.6 
